Проекция вектора. Координатные оси. Проекция точки. Координаты точки на ось. Проекция силы на ось. Проекция векторной суммы сил на ось Вычисление длины вектора по его проекциям
Вначале вспомним, что такое координатная ось , проекция точки на ось и координаты точки на оси .
Координатная ось - это прямая, которой придается какое-то направление. Можете считать, что это вектор с бесконечно большим модулем.
Координатная ось обозначается какой-либо буквой: X , Y , Z , s , t … Обычно на оси выбирается (произвольно) точка, которая называется началом отсчета и, как правило, обозначается буквой О. От этой точки отсчитываются расстояния до других интересующих нас точек.
Проекция точки на ось - это основание перпендикуляра, опущенного из этой точки на данную ось (рис. 8). То есть, проекцией точки на ось является точка.
Координата точки на ось - это число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между началом оси и проекцией точки на эту ось. Это число берется со знаком плюс, если проекция точки располагается в направлении оси от ее начала и со знаком минус, если в противоположном направлении.
Скалярная проекция вектора на ось - это число , абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между проекциями точки начала и точки конца вектора. Важно! Обычно вместо выражения скалярная проекция вектора на ось говорят просто - проекция вектора на ось , то есть слово скалярная опускают. Проекция вектора обозначается той же буквой, что и проектируемый вектор (в обычном, нежирном написании), с нижним (как правило) индексом названия оси, на которую этот вектор проектируется. Например, если на ось Х проектируется вектор а, то его проекция обозначается а x . При проектировании этого же вектора на другую ось, скажем, ось Y , его проекция будет обозначаться а y (рис. 9).

Чтобы вычислить проекцию вектора на ось (например, ось X) надо из координаты точки его конца вычесть координату точки начала, то есть
а x = х к − x н.
Надо помнить: скалярная проекция вектора на ось (или, просто, проекция вектора на ось) - это число (не вектор)! Причем, проекция может быть положительной, если величина х к больше величины х н, отрицательной, если величина х к меньше величины х н и равной нулю, если х к равно х н (рис. 10).

Проекцию вектора на ось можно также найти, зная модуль вектора и угол, который он составляет с этой осью.
Из рисунка 11 видно, что а x = а Cos α
То есть, проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением оси и направлением вектора . Если угол острый, то Cos α > 0 и а x > 0, а, если тупой, то косинус тупого угла отрицателен, и проекция вектора на ось тоже будет отрицательна.

Углы, отсчитываемые от оси против хода часовой стрелки, принято считать положительными, а по ходу - отрицательными. Однако, поскольку косинус - функция четная, то есть, Cos α = Cos (− α), то при вычислении проекций углы можно отсчитывать как по ходу часовой стрелки, так и против.
При решении задач часто будут использоваться следующие свойства проекций: если
а = b + c +…+ d , то а x = b x + c x +…+ d x (аналогично на другие оси),
a = mb , то а x = mb x (аналогично на другие оси).
Формула а x = а Cos α будет очень часто встречаться при решении задач, поэтому ее обязательно надо знать. Правило определения проекции надо знать наизусть!
Запомните!
Чтобы найти проекцию вектора на ось надо модуль этого вектора умножить на косинус угла между направлением оси и направлением вектора.
Еще раз - НАИЗУСТЬ!
Определение 1. На плоскости параллельной проекцией точки А на ось l называется точка - точка пересечения оси l с прямой, проведенной через точку А параллельно вектору, задающему направление проектирования.
Определение 2. Параллельной проекцией вектора на ось l (на вектор) называется координата вектора, относительно базиса оси l, где точки и - параллельные проекции соответственно точек А и В на ось l (рис. 1).
Согласно определению имеем
Определение 3. если и базис оси l декартов, то есть, то проекция вектора на ось l называется ортогональной (рис. 2).
В пространстве определение 2 проекции вектора на ось остается в силе, только направление проектирования задается двумя неколлинеарными векторами (рис. 3).

Из определения проекции вектора на ось вытекает, что каждая координата вектора есть проекция этого вектора на ось, определяемую соответствующим базисным вектором. При этом направление проектирования задается двумя другими базисными векторами, если проектирование ведется (рассматривается) в пространстве, или другим базисным вектором, если проектирование рассматривается на плоскости (рис. 4).

Теорема 1. Ортогональная проекция вектора на ось l равна произведению модуля вектора на косинус угла между положительным направлением оси l и, т. е.

С другой стороны
Из находим
Подставив АС в равенство (2), получим
Так как числа x и одного знака в обоих рассматриваемых случаях ((рис. 5, а) ; (рис. 5, б) , то из равенства (4) следует
Замечание. В дальнейшем мы будем рассматривать только ортогональную проекцию вектора на ось и поэтому слово «орт» (ортогональная) в обозначении будем опускать.
Приведем ряд формул, которые используются в дальнейшем при решении задач.
а)Проекция вектора на ось.
Если, то ортогональная проекция на вектор согласно формуле (5) имеет вид
в) Расстояние от точки до плоскости.

Пусть б - данная плоскость с нормальным вектором, M - данная точка,
d - расстояние от точки М до плоскости б (рис. 6).
Если N- произвольная точка плоскости б, а и - проекции точек Mи Nна ось, то
- г) Расстояние между скрещивающимися прямыми.

Пусть а и b- данные скрещивающиеся прямые, - перпендикулярный им вектор, А и В - произвольные точки прямых а и b соответственно (рис. 7), и - проекции точек Aи Bна, тогда
д) Расстояние от точки до прямой.
Пусть l - данная прямая с направляющим вектором, M - данная точка,
N - ее проекция на прямую l , тогда - искомое расстояние (рис. 8).
Если А - произвольная точка прямой l , то в прямоугольном треугольнике MNAгипотенуза MAи катет могут быть найдены. Значит,

е) Угол между прямой и плоскостью.

Пусть - направляющий вектор данной прямой l , - нормальный вектор данной плоскости б, - проекция прямой l на плоскость б (рис. 9).
Как известно, угол ц между прямой l и ее проекцией на плоскость б называется углом между прямой и плоскостью. Имеем
Приведем примеры решения метрических задач векторно-координатным методом.
Пусть в пространстве даны два вектора и . Отложим от произвольной точки O
векторы и . Углом
между векторами и называется наименьший из углов . Обозначается ![]() .
.

Рассмотрим ось l и отложим на ней единичный вектор (т.е. вектор, длина которого равна единице).

Под углом между вектором и осью l понимают угол между векторами и .
Итак, пусть l – некоторая ось и – вектор.
Обозначим через A 1 и B 1 проекции на ось l соответственно точек A и B . Предположим, что A 1 имеет координату x 1 , а B 1 – координату x 2 на оси l .

Тогда проекцией вектора на ось l называется разность x 1 – x 2 между координатами проекций конца и начала вектора на эту ось.
Проекцию вектора на ось l будем обозначать .
Ясно, что если угол между вектором и осью l острый, то x 2 > x 1 , и проекция x 2 – x 1 > 0; если этот угол тупой, то x 2 < x 1 и проекция x 2 – x 1 < 0. Наконец, если вектор перпендикулярен оси l , то x 2 = x 1 и x 2 – x 1 =0.

Таким образом, проекция вектора на ось l – это длина отрезка A 1 B 1 , взятая с определённым знаком. Следовательно, проекция вектора на ось это число или скаляр.
Аналогично определяется проекция одного вектора на другой. В этом случае находятся проекции концов даного вектора на ту прямую, на которой лежит 2-ой вектор.
Рассмотрим некоторые основные свойства проекций .
ЛИНЕЙНО ЗАВИСИМЫЕ И ЛИНЕЙНО НЕЗАВИСИМЫЕ СИСТЕМЫ ВЕКТОРОВ
Рассмотрим несколько векторов .
Линейной комбинацией данных векторов называется любой вектор вида , где - некоторые числа. Числа называются коэффициентами линейной комбинации. Говорят также, что в этом случае линейно выражается через данные векторы , т.е. получается из них с помощью линейных действий.
Например, если даны три вектора то в качестве
их линейной комбинации можно рассматривать векторы: ![]()
Если вектор представлен как линейная комбинация каких-то векторов, то говорят, что он разложен по этим векторам.
Векторы называются линейно зависимыми
, если существуют
такие числа, не все равные нулю, что ![]() . Ясно, что заданные векторы будут линейно зависимыми,
если какой-либо из этих векторов линейно выражается через остальные.
. Ясно, что заданные векторы будут линейно зависимыми,
если какой-либо из этих векторов линейно выражается через остальные.
В противном случае, т.е. когда соотношение ![]() выполняется
только при
выполняется
только при ![]() , эти векторы называются линейно независимыми
.
, эти векторы называются линейно независимыми
.
Теорема 1. Любые два вектора линейно зависимы тогда и только тогда, когда они коллинеарны.
Доказательство :
Аналогично можно доказать следующую теорему.
Теорема 2. Три вектора линейно зависимы тогда и только тогда, когда они компланарны.
Доказательство .
БАЗИС
Базисом называется совокупность отличных от нулей линейно независимых векторов. Элементы базиса будем обозначать .
В предыдущем пункте мы видели, что два неколлинеарных вектора на плоскости линейно независимы. Поэтому согласно теореме 1, из предыдущего пункта, базисом на плоскости являются любые два неколлинеарных вектора на этой плоскости.
Аналогично в пространстве линейно независимы любые три некомпланарных вектора. Следовательно, базисом в пространстве назовём три некомпланарных вектора.
Справедливо следующее утверждение.
Теорема.
Пусть в пространстве
задан базис . Тогда любой вектор можно представить в
виде линейной комбинации ![]() , где x
, y
, z
– некоторые числа. Такое разложение единственно.
, где x
, y
, z
– некоторые числа. Такое разложение единственно.
Доказательство .
Таким образом, базис позволяет однозначно сопоставить каждому вектору
тройку чисел – коэффициенты разложения этого вектора по векторам базиса: . Верно и обратное, каждой
тройке чисел x, y, z
при помощи базиса можно сопоставить вектор, если составить
линейную комбинацию ![]() .
.
Если базис и ![]() , то числа x, y, z
называются координатами
вектора в данном базисе.
Координаты вектора обозначают .
, то числа x, y, z
называются координатами
вектора в данном базисе.
Координаты вектора обозначают .
ДЕКАРТОВА СИСТЕМА КООРДИНАТ
Пусть в пространстве задана точка O и три некомпланарных вектора .
Декартовой системой координат в пространстве (на плоскости) называется совокупность точки и базиса, т.е. совокупность точки и трёх некомпланарных векторов (2-х неколлинеарных векторов), выходящих из этой точки.
Точка O называется началом координат; прямые, проходящие через начало координат в направлении базисных векторов, называются осями координат – осью абсцисс, ординат и аппликат. Плоскости, проходящие через оси координат, называют координатными плоскостями.

Рассмотрим в выбранной системе координат произвольную точку M . Введём понятие координаты точки M . Вектор , соединяющий начало координат с точкой M . называется радиус-вектором точки M .

Вектору в выбранном базисе можно сопоставить тройку чисел – его координаты: ![]() .
.
Координаты радиус-вектора точки M . называются координатами точки M . в рассматриваемой системе координат. M(x,y,z) . Первая координата называется абсциссой, вторая – ординатой, третья – аппликатой.

Аналогично определяются декартовы координаты на плоскости. Здесь точка имеет только две координаты – абсциссу и ординату.
Легко видеть, что при заданной системе координат каждая точка имеет определённые координаты. С другой стороны, для каждой тройки чисел найдётся единственная точка, имеющая эти числа в качестве координат.
Если векторы, взятые в качестве базиса, в выбранной системе координат, имеют единичную длину и попарно перпендикулярны, то система координат называется декартовой прямоугольной.

Несложно показать, что .
Направляющие косинусы вектора полностью определяют его направление, но ничего не говорят о его длине.
Ответ:
Свойства проекций:
Свойства проекции вектора
Свойство 1.
Проекция суммы двух векторов на ось равна сумме проекций векторов на ту же ось: ![]()
Это свойство позволяет заменять проекцию суммы векторов суммой их проекций и наоборот.
Свойство 2. Если вектор умножается на число λ, то его проекция на ось также умножается на это число:
![]()
Свойство 3.
Проекция вектора на ось l равна произведению модуля вектора на косинус угла между вектором и осью:
Орт оси. Разложение вектора по координатным ортам. Координаты вектора. Свойства координат
Ответ:
Орты осей.

Прямоугольная система координат (любой размерности) также описывается набором ортов, сонаправленных с осями координат. Количество ортов равно размерности системы координат и все они перпендикулярны друг другу.
В трёхмерном случае орты обычно обозначаются
И Могут также применяться обозначения со стрелками и
При этом в случае правой системы координат действительны следующие формулы с векторными произведениями ортов:
Разложение вектора по координатным ортам.
Орт координатной оси обозначается через , оси - через , оси - через (рис. 1)

Для любого вектора который лежит в плоскости имеет место следующее разложение:
Если вектор ![]() расположен в пространстве, то разложение по ортам координатных осей имеет вид:
расположен в пространстве, то разложение по ортам координатных осей имеет вид:
Координаты вектора:
Чтобы вычислить координаты вектора, зная координаты (x1; y1) его начала A и координаты (x2; y2) его конца B, нужно из координат конца вычесть координаты начала: (x2 – x1; y2 – y1).
Свойства координат.
Рассмотрим координатную прямую с началом координат в точке О и единичным вектором i. Тогда для любого вектора a на этой прямой: a = axi.
Число ax называется координатой вектора a на координатной оси.
Свойство 1. При сложении векторов на оси их координаты складываются.
Свойство 2. При умножении вектора на число его координата умножается на это число.
Скалярное произведение векторов. Свойства.
Ответ:
Скалярным произведением двух ненулевых векторов называется число,
равное произведению этих векторов на косинус угла между ними.
![]()
![]()
Свойства:
1. Скалярное произведение обладает переместительным свойством: ab=bа

Скалярное произведение координатных ортов. Определение скалярного произведения векторов, заданных своими координатами.
Ответ:
Скалярное произведение (×) орты
| (X) | I | J | K |
| I | |||
| J | |||
| K |
Определение скалярного произведения векторов, заданных своими координатами.
Скалярное произведение двух векторов и заданных своими координатами, может быть вычислено по формуле
![]()
Векторное произведение двух векторов. Свойства векторного произведения.
Ответ:
Три некомпланарных вектора образуют правую тройку если с конца третьего поворот от первого вектора ко второму совершается против часовой стрелки. Если по часовой – то левую., если нет то в противоположном (показать как он показывал с «ручками»)
Векторным произведением вектора а на векторb называется вектор с который:
1. Перпендикулярен векторам а иb
2. Имеет длину, численно равную площади параллелограмма, образованного на a и b векторах
![]()
3. Векторы, a ,b , и c образуют правую тройку векторов
Свойства:
1. ![]()
3. ![]()
4. ![]()

Векторное произведение координатных ортов. Определение векторного произведения векторов, заданных своими координатами.
Ответ:
Векторное произведение координатных ортов.

Определение векторного произведения векторов, заданных своими координатами.
Пусть векторы а = (х1; у1; z1) и b = (х2; у2; z2) заданы своими координатами в прямоугольной декартовой системе координат О, i, j, k, причем тройка i, j, k является правой.
Разложим а и b по базисным векторам:
а = x 1 i + y 1 j + z 1 k, b = x 2 i + y 2 j + z 2 k.
Используя свойства векторного произведения, получаем
[а; b] = =
= x 1 x 2 + x 1 y 2 + x 1 z 2 +
+ y 1 x 2 + y 1 y 2 + y 1 z 2 +
+ z 1 x 2 + z 1 y 2 + z 1 z 2 . (1)
По определению векторного произведения находим
= 0, = k, = - j,
= - k, = 0, = i,
= j, = - i. = 0.
Учитывая эти равенства, формулу (1) можно записать так:
[а; b] = x 1 y 2 k - x 1 z 2 j - y 1 x 2 k + y 1 z 2 i + z 1 x 2 j - z 1 y 2 i
[а; b] = (y 1 z 2 - z 1 y 2) i + (z 1 x 2 - x 1 z 2) j + (x 1 y 2 - y 1 x 2) k. (2)
Формула (2) дает выражение для векторного произведения двух векторов, заданных своими координатами.
Полученная формула громоздка.Используя обозначения определителей можно записать ее в другом более удобном для запоминания виде:
Обычно формулу (З) записывают еще короче:

Будут и задачи для самостоятельного решения, к которым можно посмотреть ответы.
Понятие вектора
Прежде чем Вы узнаете всё о векторах и операциях над ними, настройтесь на решение несложной задачи. Есть вектор Вашей предприимчивости и вектор Ваших инновационных способностей. Вектор предприимчивости ведёт Вас к Цели 1, а вектор инновационных способностей - к Цели 2. Правила игры таковы, что Вы не можете двигаться сразу по направлениям двух этих векторов и достигнуть сразу двух целей. Векторы взаимодействуют, или, если говорить математическим языком, над векторами производится некоторая операция. Результатом этой операции становится вектор "Результат", который приводит Вас к Цели 3.
А теперь скажите: результатом какой операции над векторами "Предприимчивость" и "Инновационные способности" является вектор "Результат"? Если не можете сказать сразу, не унывайте. По мере изучения этого урока Вы сможете ответить на этот вопрос.
Как мы уже увидели выше, вектор обязательно идёт от некоторой точки A по прямой к некоторой точке B . Следовательно, каждый вектор имеет не только числовое значение - длину, но также физическое и геометрическое - направленность. Из этого выводится первое, самое простое определение вектора. Итак, вектор - это направленный отрезок, идущий от точки A к точке B . Обозначается он так: .

А чтобы приступить к различным операциям с векторами , нам нужно познакомиться с ещё одним определением вектора.
Вектор - это вид представления точки, до которой требуется добраться из некоторой начальной точки. Например, трёхмерный вектор, как правило, записывается в виде (х, y, z ) . Говоря совсем просто, эти числа означают, как далеко требуется пройти в трёх различных направлениях, чтобы добраться до точки.
Пусть дан вектор. При этом x = 3 (правая рука указывает направо), y = 1 (левая рука указывает вперёд), z = 5 (под точкой стоит лестница, ведущая вверх). По этим данным вы найдёте точку, проходя 3 метра в направлении, указываемом правой рукой, затем 1 метр в направлении, указываемом левой рукой, а далее Вас ждёт лестница и, поднимаясь на 5 метров, Вы, наконец, окажетесь в конечной точке.
Все остальные термины - это уточнения представленного выше объяснения, необходимые для различных операций над векторами, то есть, решения практических задач. Пройдёмся по этим более строгим определениям, останавливаясь на типичных задачах на векторы.
Физическими примерами векторных величин могут служить смещение материальной точки, двигающейся в пространстве, скорость и ускорение этой точки, а также действующая на неё сила.

Геометрический вектор представлен в двумерном и трёхмерном пространстве в виде направленного отрезка . Это отрезок, у которого различают начало и конец.
Если A - начало вектора, а B - его конец, то вектор обозначается символом или одной строчной буквой . На рисунке конец вектора указывается стрелкой (рис. 1)
Длиной (или модулем ) геометрического вектора называется длина порождающего его отрезка
Два вектора называются равными , если они могут быть совмещены (при совпадении направлений) путём параллельного переноса, т.е. если они параллельны, направлены в одну и ту же сторону и имеют равные длины.
В физике часто рассматриваются закреплённые векторы , заданные точкой приложения, длиной и направлением. Если точка приложения вектора не имеет значения, то его можно переносить, сохраняя длину и направление в любую точку пространства. В этом случае вектор называется свободным . Мы договоримся рассматривать только свободные векторы .
Линейные операции над геометрическими векторами

Умножение вектора на число
Произведением вектора на число называется вектор, получающийся из вектора растяжением (при ) или сжатием (при ) в раз, причём направление вектора сохраняется, если , и меняется на противоположное, если . (Рис. 2)
Из определения следует, что векторы и = всегда расположены на одной или на параллельных прямых. Такие векторы называются коллинеарными . (Можно говорить также, что эти векторы параллельны, однако в векторной алгебре принято говорить "коллинеарны".) Справедливо и обратное утверждение: если векторы и коллинеарны, то они связаны отношением
Следовательно, равенство (1) выражает условие коллинеарности двух векторов.

Сложение и вычитание векторов
При сложении векторов нужно знать, что суммой векторов и называется вектор , начало которого совпадает с началом вектора , а конец - с концом вектора , при условии, что начало вектора приложено к концу вектора . (Рис. 3)

Это определение может быть распределено на любое конечное число векторов. Пусть в пространстве даны n
свободных векторов . При сложении
нескольких векторов за их сумму принимают замыкающий вектор, начало которого
совпадает с началом первого вектора, а конец - с концом последнего вектора. То есть, если к концу вектора
приложить начало вектора , а к концу вектора
- начало вектора и т.д. и, наконец, к концу вектора
- начало вектора , то
суммой этих векторов служит замыкающий вектор ![]() , начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
, начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
Слагаемые называются составляющими вектора , а сформулированное правило - правилом многоугольника . Этот многоугольник может и не быть плоским.
При умножении вектора на число -1 получается противоположный вектор . Векторы и имеют одинаковые длины и противоположные направления. Их сумма даёт нулевой вектор , длина которого равна нулю. Направление нулевого вектора не определено.
В векторной алгебре нет необходимости рассматривать отдельно операцию вычитания: вычесть из вектора
вектор
означает прибавить к вектору противоположный вектор
, т.е. ![]()
Пример 1. Упростить выражение:
![]() .
.
 ,
,
то есть, векторы можно складывать и умножать на числа так же, как и многочлены (в частности, также задачи на упрощение выражений). Обычно необходимость упрощать линейно подобные выражения с векторами возникает перед вычислением произведений векторов.
Пример 2. Векторы и служат диагоналями параллелограмма ABCD (рис. 4а). Выразить через и векторы , , и , являющиеся сторонами этого параллелограмма.
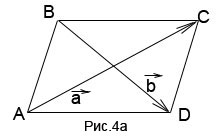
Решение. Точка пересечения диагоналей параллелограмма делит каждую диагональ пополам. Длины требуемых в условии задачи векторов находим либо как половины сумм векторов, образующих с искомыми треугольник, либо как половины разностей (в зависимости от направления вектора, служащего диагональю), либо, как в последнем случае, половины суммы, взятой со знаком минус. Результат - требуемые в условии задачи векторы:

Есть все основания полагать, что теперь Вы правильно ответили на вопрос о векторах "Предприимчивость" и "Инновационные способности" в начале этого урока. Правильный ответ: над этими векторами производится операция сложения.
Решить задачи на векторы самостоятельно, а затем посмотреть решения
Как найти длину суммы векторов?
Эта задача занимает особое место в операциях с векторами, так как предполагает использование тригонометрических свойств. Допустим, Вам попалась задача вроде следующей:
Даны длины векторов ![]() и длина суммы этих векторов .
Найти длину разности этих векторов .
и длина суммы этих векторов .
Найти длину разности этих векторов .
Решения этой и других подобных задач и объяснения, как их решать - в уроке "Сложение векторов: длина суммы векторов и теорема косинусов ".
А проверить решение таких задач можно на Калькуляторе онлайн "Неизвестная сторона треугольника (сложение векторов и теорема косинусов)" .
А где произведения векторов?
Произведения вектора на вектор не являются линейными операциями и рассматриваются отдельно. И у нас есть уроки "Скалярное произведение векторов " и "Векторное и смешанное произведения векторов ".
Проекция вектора на ось
Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
Как известно, проекцией точки A на прямую (плоскость) служит основание перпендикуляра , опущенного из этой точки на прямую (плоскость).

Пусть - произвольный вектор (Рис. 5), а и - проекции его начала (точки A ) и конца (точки B ) на ось l . (Для построения проекции точки A ) на прямую проводим через точку A плоскость, перпендикулярную прямой. Пересечение прямой и плоскости определит требуемую проекцию.
Составляющей вектора на оси l называется такой вектор , лежащий на этой оси, начало которого совпадает с проекцией начала, а конец - с проекцией конца вектора .
Проекцией вектора на ось l называется число
![]() ,
,
равное длине составляющего вектора на этой оси, взятое со знаком плюс, если направление составляюшей совпадает с направлением оси l , и со знаком минус, если эти направления противоположны.
Основные свойства проекций вектора на ось:
1. Проекции равных векторов на одну и ту же ось равны между собой.
2. При умножении вектора на число его проекция умножается на это же число.
3. Проекция суммы векторов на какую-либо ось равна сумме проекций на эту же ось слагаемых векторов.
4. Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
 .
.

Решение. Спроектируем векторы на ось l как определено в теоретической справке выше. Из рис.5а очевидно, что проекция суммы векторов равна сумме проекций векторов. Вычисляем эти проекции:

Находим окончательную проекцию суммы векторов:
Связь вектора с прямоугольной декартовой системой координат в пространстве
Знакомство с прямоугольной декартовой системой координат в пространстве состоялось в соответствующем уроке , желательно открыть его в новом окне.
В упорядоченной системе координатных осей 0xyz ось Ox называется осью абсцисс , ось 0y – осью ординат , и ось 0z – осью аппликат .

С произвольной точкой М пространства свяжем вектор
называемый радиус-вектором точки М и спроецируем его на каждую из координатных осей. Обозначим величины соответствующих проекций:
Числа x, y, z называются координатами точки М , соответственно абсциссой , ординатой и аппликатой , и записываются в виде упорядоченной точки чисел: M (x; y; z) (рис.6).
Вектор единичной длины, направление которого совпадает с направлением оси, называют единичным вектором (или ортом ) оси. Обозначим через
Соответственно орты координатных осей Ox , Oy , Oz
![]()
Теорема. Всякий вектор может быть разложен по ортам координатных осей:

![]() (2)
(2)
Равенство (2) называется разложением вектора по координатным осям. Коэффициентами этого разложения являются проекции вектора на координатные оси. Таким образом, коэффициентами разложения (2) вектора по координатным осям являются координаты вектора.
После выбора в пространстве определённой системы координат вектор и тройка его координат однозначно определяют друг друга, поэтому вектор может быть записан в форме
Представления вектора в виде (2) и (3) тождественны.
Условие коллинеарности векторов в координатах
Как мы уже отмечали, векторы называются коллинеарными, если они связаны отношением
Пусть даны векторы ![]() .
Эти векторы коллинеарны, если координаты векторов связаны отношением
.
Эти векторы коллинеарны, если координаты векторов связаны отношением
![]() ,
,
то есть, координаты векторов пропорциональны.
Пример 6.
Даны векторы ![]() .
Коллинеарны ли эти векторы?
.
Коллинеарны ли эти векторы?
Решение. Выясним соотношение координат данных векторов:
![]() .
.
Координаты векторов пропорциональны, следовательно, векторы коллинеарны, или, что то же самое, параллельны.
Длина вектора и направляющие косинусы
Вследствие взаимной перпендикулярности координатных осей длина вектора
![]()
равна длине диагонали прямоугольного параллелепипеда, построенного на векторах
и выражается равенством
![]() (4)
(4)
Вектор полностью определяется заданием двух точек (начала и конца), поэтому координаты вектора можно выразить через координаты этих точек.
Пусть в заданной системе координат начало вектора находится в точке
а конец – в точке


Из равенства
Следует, что
или в координатной форме
Следовательно, координаты вектора равны разностям одноимённых координат конца и начала вектора . Формула (4) в этом случае примет вид
Направление вектора определяют направляющие косинусы . Это косинусы углов, которые вектор образует с осями Ox , Oy и Oz . Обозначим эти углы соответственно α , β и γ . Тогда косинусы этих углов можно найти по формулам
Направляющие косинусы вектора являются также координатами орта этого вектора и, таким образом, орт вектора

![]() .
.
Учитывая, что длина орта вектора равна одной единице, то есть
![]() ,
,
получаем следующее равенство для направляющих косинусов:
Пример 7. Найти длину вектора x = (3; 0; 4).
Решение. Длина вектора равна
![]()
Пример 8. Даны точки:
Выяснить, равнобедренный ли треугольник, построенный на этих точках.
Решение. По формуле длины вектора (6) найдём длины сторон и установим, есть ли среди них две равные:

Две равные стороны нашлись, следовательно необходимость искать длину третьей стороны отпадает, а заданный треугольник является равнобедренным.
Пример 9.
Найти длину вектора
и его направляющие косинусы, если ![]() .
.
Решение. Координаты вектора даны:
![]() .
.
Длина вектора равна квадратному корню из суммы квадратов координат вектора:
![]() .
.
Находим направляющие косинусы:

Решить задачу на векторы самостоятельно, а затем посмотреть решение
Операции над векторами, заданными в координатной форме
Пусть даны два вектора и , заданные своими проекциями:
![]()
![]()
Укажем действия над этими векторами.
Статьи по теме